
 Maths, Physics & Chemistry
Maths, Physics & Chemistry
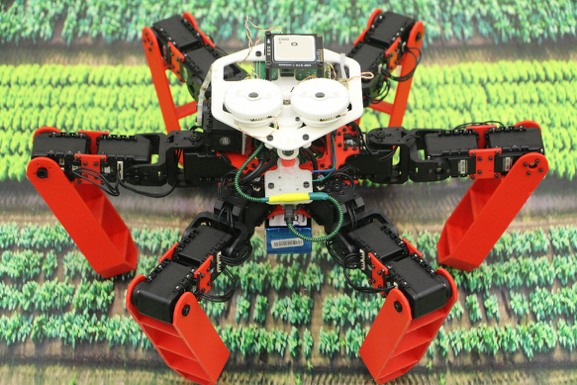
AntBot is able to go home like desert ants
Designed to move, sense and behave like desert ants, AntBot is a robot able to navigate autonomously without GPS. Fully 3d-printed, this open-source project aims at providing autonomous vehicles with new robust and accurate navigation systems.
Autonomous navigation is one of the leading technological challenges of the 21st century in the fields of the automotive industry, air and maritime transport, and mobile robotics. To be functional, such systems must perform multi-sensor data fusion provided by the GPS and other devices like radars and embedded cameras. Although well-performing, the accuracy of the civilian GPS is hampered by both the urban infrastructures surrounding the vehicle and the meteorological conditions. Camera-based strategies are also able to precisely estimate the vehicle's position in its environment, but the data processing requires important computational resources, and the performances depend on the stability of the lightening conditions. However, when put together, all these techniques are capable of compensating for their disadvantages with interesting results.
The challenge is to develop brand new navigation systems reliable enough to increase the robustness and the accuracy of the localization of vehicles, aircrafts, ships and robots in a wide range of environmental and meteorological conditions. We have developed a hexapod walking robot, called AntBot, inspired by desert ants Cataglyphis fortis.
Unlike their European cousins, desert ants cannot refer to pheromone trails to home after roaming in the desert. In the scorching desert's conditions, the extreme heat would instantly destroy the pheromones dropped on the ground. Instead, they use their vision and they count their strides to find their way back to the nest entrance. This is a famous strategy that biologists call path integration and explain how such small insects can successfully go back to the nest after a 1km-long trajectory in the desert! To achieve this outstanding behavior, desert ants determine their heading based on a sophisticate biological approach. Firstly, they analyze the light coming from the atmosphere to estimate its heading. Secondly, they estimate the distance traveled by counting their strides and integrating the scrolling speed of the ground: this is referred to as optic flow.
To mimic this outstanding behavior, the AntBot robot is equipped with two tiny, unconventional visual sensors. The first one is a sky compass: it is composed of two pixels topped with filters that measure and analyze the skylight. This compass works in the same way as the traditional magnetic compass - the difference is that the reference is no longer the magnetic North but the skylight. This sky compass was inspired by ants' eyes which are sensitive to some specific properties of the skylight - properties that we, humans, are unable to see. It provided strong results in a wide range of meteorological conditions, thus suggesting it would fit for outdoor autonomous navigation applications2. The purpose of the sky compass is to make the robot able to determine its heading while simply referring to the skydome.
The second visual sensor reproduces the ant's ability to track the optic flow (strides and speed of the covered track). This scrolling speed sensor is made of only 12 pixels! In addition, those pixels are similar to biological eyes and can, therefore, adapt to the changing of ambient light. This is a key parameter to make a visual-based navigation system functional in real-world where ambient light can change randomly. The AntBot robot uses this 12-pixel sensor combined with the stride counter to estimate the distance traveled.
AntBot took its first steps in the heart of the French Calanques National Park. The robot, endowed with the desert ant-inspired navigation system, was able to precisely locate without GPS nor map, and find its way back home with accuracy 100 times better than the GPS. It also showed that such bio-inspired navigation approach can help to improve our traditional tools without increasing the development cost or the computational needs. Future autonomous cars could benefit this ant-based navigation system as a spare in case of GPS failure.
1 Dupeyroux, J., Serres, J. R., & Viollet, S. (2019). AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics, 4(27), eaau0307.
2 Dupeyroux, J., Viollet, S., & Serres, J. R. (2019). Polarized skylight-based heading measurements: a bio-inspired approach. Journal of the Royal Society Interface, 16(150), 20180878.
3 Wehner, R., & Wehner, S. (1990). Insect navigation: use of maps or Ariadne's thread? Ethology Ecology & Evolution, 2(1), 27-48.
Original Article:
J. Dupeyroux, J. R. Serres, S. Viollet, AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics 4, eaau0307 (2019)Next read: How an artificial intelligence bends a single molecule by Christian Wagner , Klaus-Robert Müller , F. Stefan Tautz
Edited by:
Massimo Caine , Founder and Director
We thought you might like
Spicing up restoration: can a dash of pepper powder defend native plants?
Dec 20, 2018 in Plant Biology | 3.5 min read by Dean PearsonCan robots teach us about animal flight?
Apr 10, 2019 in Maths, Physics & Chemistry | 3.5 min read by Matěj KarásekA robotic capsule to explore the gastrointestinal tract
Mar 4, 2020 in Maths, Physics & Chemistry | 3.5 min read by Joseph C. NortonCheetah-inspired soft robots: how to make robots run fast?
May 4, 2021 in Maths, Physics & Chemistry | 3.5 min read by Jie Yin , Yichao TangMore from Maths, Physics & Chemistry
Testing gravity through the distortion of time
Sep 20, 2024 in Maths, Physics & Chemistry | 3 min read by Sveva CastelloStacking molecular chips in multiple dimensions
Aug 30, 2024 in Maths, Physics & Chemistry | 3 min read by Lucía Gallego , Romain Jamagne , Michel RickhausReversible Anticoagulants: Inspired by Nature, Designed for Safety
Jun 12, 2024 in Maths, Physics & Chemistry | 4 min read by Millicent Dockerill , Nicolas WinssingerDistance-preserving moves always keep a point fixed
May 18, 2024 in Maths, Physics & Chemistry | 4 min read by Shaula FiorelliA resonance triggers chemical reactions between the coldest molecules
Apr 5, 2024 in Maths, Physics & Chemistry | 3 min read by Juliana Park , Wonyl ChoiEditor's picks
Trending now
Popular topics