
 Maths, Physics & Chemistry
Maths, Physics & Chemistry
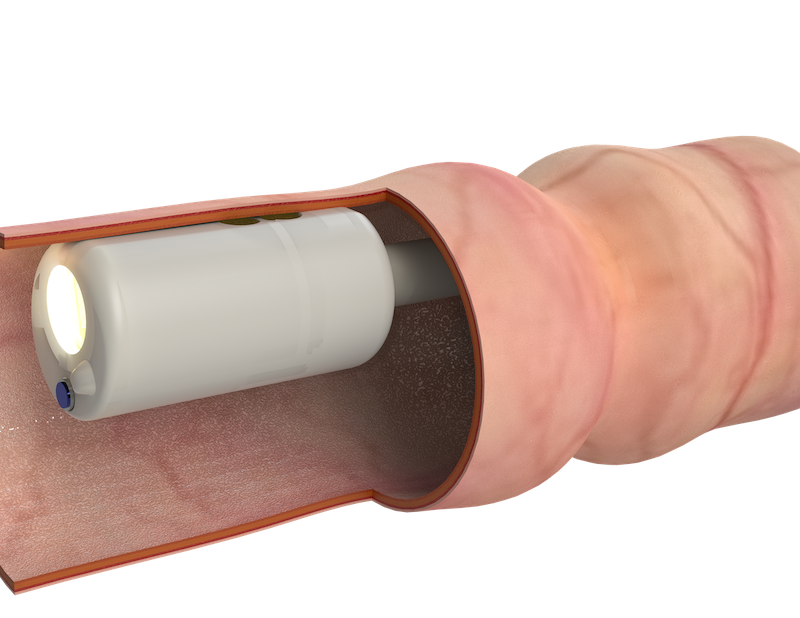
A robotic capsule to explore the gastrointestinal tract
There are numerous debilitating diseases of the gastrointestinal tract and these need to be accurately diagnosed before treatment. We developed a miniature robot equipped with ultrasound technology to navigate and take precise measurements deep inside the gastrointestinal tract.
Diseases of the gastrointestinal tract place a significant burden on society and include colorectal cancer, which alone accounts for almost a million deaths each year. Standard flexible endoscopy is the gold standard procedure to diagnose these diseases. It involves the skillful navigation of a long "scope" through the gastrointestinal tract by a highly trained doctor. This practice allows direct inspection of the tissue and basic tasks such as tissue biopsies to confirm diagnoses. Although it is performed millions of times every year, it has major drawbacks. It represents severe patient discomfort, risk of serious complications, high procedure complexity, and an inability to access all regions of the gastrointestinal tract.
We wanted to solve this by exploring the concept of combining robotic capsule technology and microultrasound. Robotic capsules - small, capsule-shaped robots - can potentially access the entire gastrointestinal tract while allowing the operator to maintain control over their position. Microultrasound is high-frequency ultrasound with a resolution in the tens of microns - perfect for the gastrointestinal tract, which has a thickness in the order of a few millimeters. This could allow doctors to visualize the individual layers of the bowel tissue, take measurements, and perhaps determine whether the tissue is healthy or diseased. However, at this small scale, microultrasound probes are very challenging to use as they must be pressed into and aligned continuously with the tissue. The gastrointestinal tract is soft, unstructured, dynamic, and very hard to access.
To manipulate the probe - and the robotic capsule generally - we leveraged our previous expertise on magnetic manipulation as a method of actuation. We applied forces and torques via interacting magnetic fields (one in the robotic capsule and one attached to a robotic arm outside the patient). We can pull the robotic capsule through the gastrointestinal tract, steer it around the bends and finely adjust the orientation to align the probe with the tissue for ultrasound imaging. With position and ultrasound feedback, we can also autonomously adjust the robotic capsule pose until we see ultrasound images of a substrate. So our study focused on asking: Is it clinically feasible to combine robotic capsule and microultrasound technologies? What level of robotic assistance is necessary to achieve this?
The first task was to design and fabricate the robotic capsule. We needed: a camera and light source to aid navigation through the gastrointestinal tract; the magnet core for actuation; a circuit with position sensors; the microultrasound probe and its electronics. The prototype was 3D printed and then assembled carefully by hand.
Next, we performed tests in a laboratory environment to characterize the system and show the core functionality: Can we accurately manipulate the robotic capsule? Can we acquire clear ultrasound images? Can we do both of these autonomously? For these tests, we developed a substrate that mimics the acoustic properties of soft tissue, and we placed interesting features inside it to detect with ultrasound. We then performed tests in a biological environment to show clinical feasibility and what level of robotic assistance is required. A biological environment is crucial for testing, as synthetic materials don't come close to mimicking the complex properties of a living organism.
We successfully combined magnetic robotic capsule and microultrasound technologies. We also showed that magnetic manipulation is an effective method of actuation because it is safe and encourages continuous contact with the environment. However, even in a controlled environment, it is very difficult to manually position the robotic capsule for ultrasound imaging because the probes must be aligned precisely.
We combined microultrasound feedback in the robotic control to perform autonomous ultrasound imaging, precisely tilting the robotic capsule and applying force until the system saw features of a clear image. This allowed the capture of ultrasound images with ease and allowed more complex movements, including autonomously scanning across a surface. The resulting ultrasound data was collected and combined to form an image of the substrate that was used to detect and measure features with high accuracy (~1-2mm).
We also showed clinical feasibility in the biological model. While manual control of traditional abdominal ultrasound probes is practical, in this environment, robotic assistance is essential, and images of the bowel wall were only captured successfully with robotic assistance.
We have shown what the future of gastrointestinal intervention could look like by designing, fabricating, and testing the first robotic capsule with magnetic control and microultrasound sensing. With advancements in probe design and device miniaturization, this technology could one day transform the way we diagnose and treat gastrointestinal disease.
Original Article:
Norton J, Slawinski P, Lay H et al. Intelligent magnetic manipulation for gastrointestinal ultrasound. Sci Robot. 2019;4(31):eaav7725.Edited by:
Massimo Caine , Founder and Director
We thought you might like
Can robots teach us about animal flight?
Apr 10, 2019 in Maths, Physics & Chemistry | 3.5 min read by Matěj KarásekAntBot is able to go home like desert ants
Aug 29, 2019 in Maths, Physics & Chemistry | 3 min read by Julien Dupeyroux , Stéphane Viollet , Julien R. SerresCheetah-inspired soft robots: how to make robots run fast?
May 4, 2021 in Maths, Physics & Chemistry | 3.5 min read by Jie Yin , Yichao TangHow an artificial intelligence bends a single molecule
Jul 9, 2021 in Maths, Physics & Chemistry | 4.5 min read by Christian Wagner , Klaus-Robert Müller , F. Stefan TautzMore from Maths, Physics & Chemistry
Testing gravity through the distortion of time
Sep 20, 2024 in Maths, Physics & Chemistry | 3 min read by Sveva CastelloStacking molecular chips in multiple dimensions
Aug 30, 2024 in Maths, Physics & Chemistry | 3 min read by Lucía Gallego , Romain Jamagne , Michel RickhausReversible Anticoagulants: Inspired by Nature, Designed for Safety
Jun 12, 2024 in Maths, Physics & Chemistry | 4 min read by Millicent Dockerill , Nicolas WinssingerDistance-preserving moves always keep a point fixed
May 18, 2024 in Maths, Physics & Chemistry | 4 min read by Shaula FiorelliA resonance triggers chemical reactions between the coldest molecules
Apr 5, 2024 in Maths, Physics & Chemistry | 3 min read by Juliana Park , Wonyl ChoiEditor's picks
Trending now
Popular topics